
教育产品
共 6 个产品
-

直线倒立摆
既可以满足相关本科专业的教学实验需求,也适用于部分研究生专业,如控制理论与控制工程、控制工程、控制科学与工程等。¥ 0.00立即购买
-

环形倒立摆
控制工程类经典的实验对象,控制器采用的是以太网通信,并支持IO、AI及AO,支持CAN总线通讯,方便用户系统扩展。提供Matlab、VC及VB多版本的开源SDK,降低用户完成系统设计所需的建模、算法实现与编程能力要求,解决用户系统仿真容易与实物控制算法实现难的现实问题。¥ 0.00立即购买
-
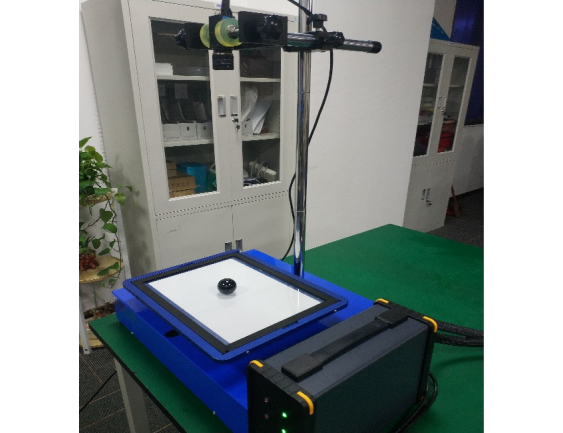
板球系统
板球系统是一个典型的多变量、非线性控制对象,它是杆球系统的扩展,其控制对象是具有两个相互垂直的旋转轴的平板,目的是让一个自由滚动的玻璃小球能够平衡在平板上的特定位置,或者沿一定的轨迹滚动,平板绕X轴和Y轴的旋转由两个伺服电机驱动,平板上方工业相机得到小球在平板上的位置后反馈给控制系统,控制系统采用一定的控制策略控制平板在X轴和Y轴方向的转角,达到小球在板上平衡位置和运动轨迹的控制。板球系统是一款趣味性比较强的自动控制实验设备,可以比较直观的展示各种控制算法的控制效果。¥ 0.00立即购买
-
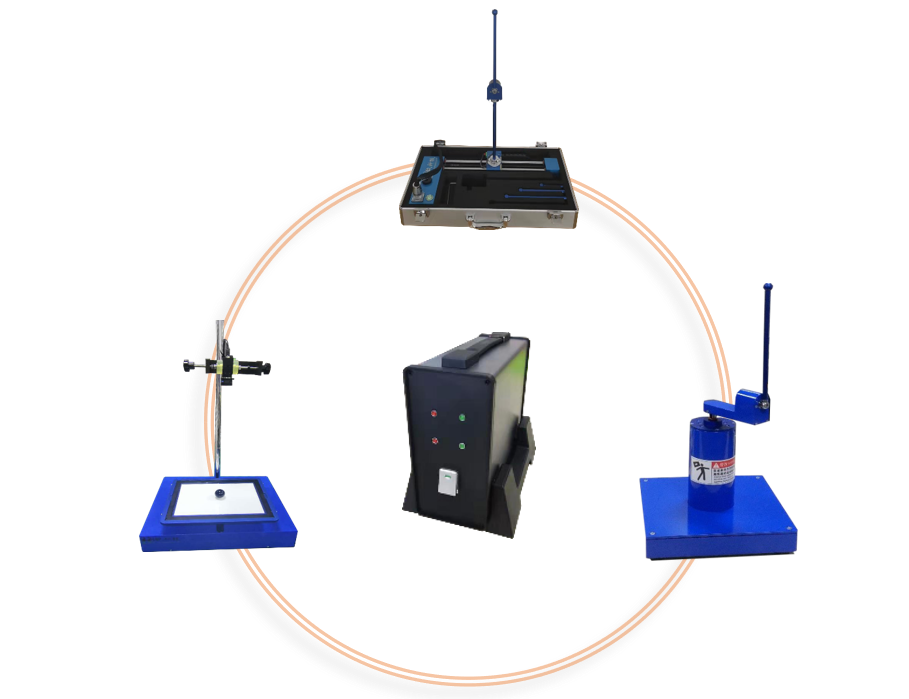
智能控制创新套件
智能控制创新套装是为满足当前高校智能控制教学与研究而开发的一款创新产品,主要由便携型直线一级倒立摆、便携型环形一级倒立摆和便携型板球系统三个富有趣味性的运动控制对象组成。三个控制对象均采用通用的软硬件设计架构,使得三个对象可以共用一个驱动控制一体箱,减轻本体重量同时也大大降低了算法移植难度。系统底层控制基于嵌入式微处理器STM32设计,提供丰富的通讯接口,支持CAN总线、RS232、RS485、Ethernet四种通讯方式,方便扩展其他控制对象。控制程序主要基于Matlab/Simulink平台开发,学生可以利用Simulink现有的工具箱快速搭建各种智能控制算法模型进行仿真与实物控制实验。智能控制创新套装还提供开源的基于C++以及当前最为流行的人工智能编程语言Python开发的控制程序,学生可以根据个人兴趣自由选择合适的开发语言去实现自己的控制算法。¥ 0.00立即购买
-

三维桥式吊车系统
桥式吊车负载能力强、操作灵活,在工业与运输领域有着广泛的应用。但是,桥式吊车是一种典型的非线性、强耦合、欠驱动系统,要实现对其安全高效的控制面临着许多困难,因此,这类系统的控制已经成为当前的研究热点。格致科技根据真实桥式吊车系统的组成结构设计的实验系统,主要包括支撑框架、桥架、台车以及负载,驱动装置主要包括3台伺服电机,它们分别负责为桥式吊车系统提供台车沿方向运动驱动力、台车与桥架沿方向运动的驱动力以及提升负载的卷轴驱动力,负载可以由支撑框架结构空间中的任意起点运动到任意终点,此过程中三个方向同时运动且使台车快速、准确定位,负载晃动尽可能地小,即实现三维桥式吊车的快速、准确定位与防摆控制。该实验系统为高校进行此类控制研究的老师和学生提供了一个理想平台。¥ 0.00立即购买
-
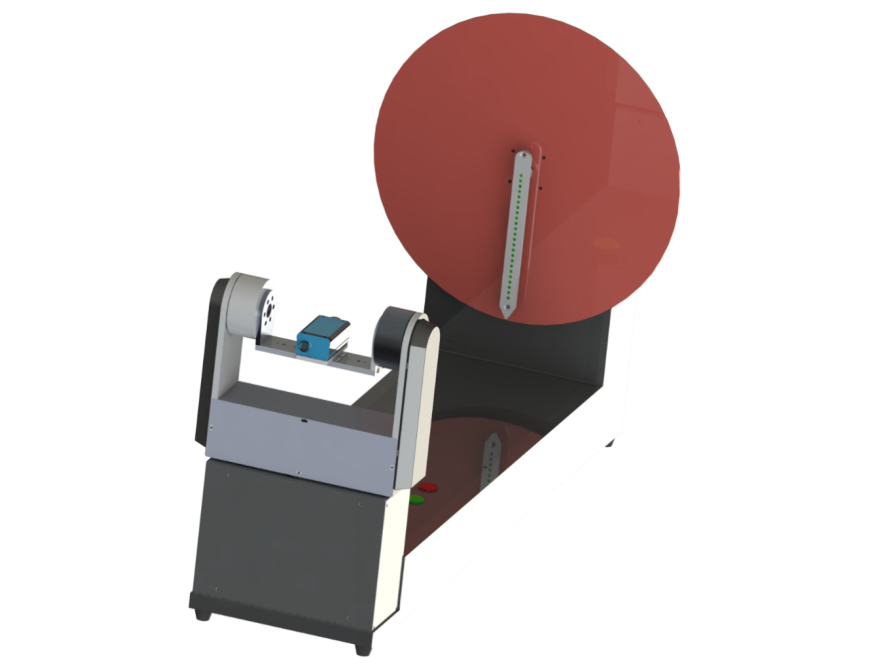
智能视觉动态跟踪系统
智能视觉动态跟踪系统包含PT转台、视觉采集单元、动态目标模拟器及智能视觉控制系统。系统是基千雷达连续搜索和跟踪动态目标的思路,采用视觉作为反馈方式,通过图像处理技术搜索到目标,科学设计跟踪控制算法,控制转台运动,实时动态追踪目标。
转台本体采用模块化设计技术,PAN 转台和TILT 转台为互相独立之模块,拆卸方便,既可独立控制,又可联动控制; 采用直流伺服电机驱动和谐波减速器传动,保证了平台不仅低速运行平稳,而且动态响应特性快; 控制系统由 PC 和工业运动控制器组成,保证了控制系统的开放性和扩展的方便性; 控制软件开发平台采用Windows平台,能充分利用各种可视化的开发工具,大大简化实验、研究和开发的进度。¥ 0.00立即购买






